Anular componente integral y derivativa. Ajustar Kp muy bajo.
Inducir un escalón brusco en SP y observar salida.
Aumentar ganancia Kp hasta que el sistema se comporte como críticamente estable (oscilante). Medir periodo de oscilaciones (Pc) y obtener constantes integral y derivativa en la tabla:
Método de oscilaciones amortiguadas
No siempre se puede aplicar Ziegler-Nichols ya que el comportamiento oscilante podría dañar equipos. Harriot propone:
Anular componente integral y derivativa. Ajustar Kp muy bajo.
Inducir un escalón brusco en SP y observar salida.
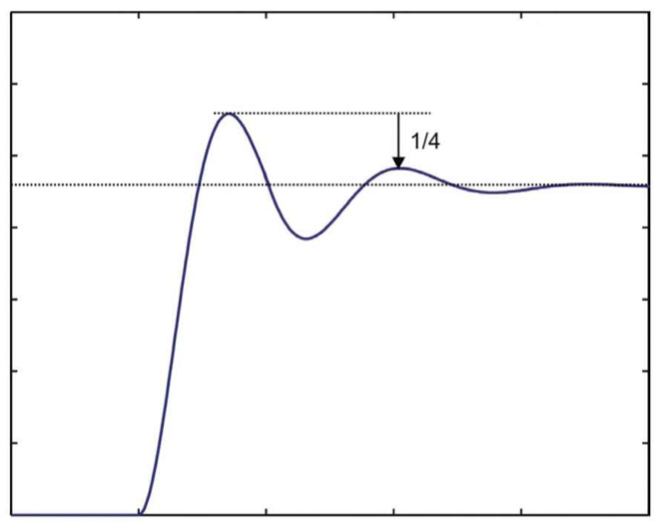
Aumentar ganancia Kp hasta que la relación entre el primer pico y el segundo sea de 1/4:
Criterio de Harriot
Medir periodo de oscilaciones (P). Ajustar:
Ti = P/6
Td = 2P/3
Ahora la respuesta ha cambiado. Sin cambiar Ti ni Td, reajustar Kp hasta que la relación entre el primer pico y el segundo vuelva a ser 1/4.
Método del relé
(no entra)
Otras estrategias de control avanzado
Control en adelanto
El control en adelanto o ”feedforward” consisten en medir las perturbacionies y actuar sobre la planta en función de la magnitud de esas perturbaciones (representadas por “d”):
Control en cascada
A veces un sistema de control se puede dividir en varios sistemas de control. En el sistema de la figura deseamos regular el nivel de un depósito (control principal o maestro). En este caso, el nivel tiene que ver con el caudal de entrada (control secundario o esclavo), así que para trabajar en cascada, usaremos un controlador de nivel que actuará sobre un controlador de caudal.
Otro ejemplo: en un secadero de tubo rotativo (trómel), se usa aire caliente para secar. La temperatura de salida del trómel se toma como referencia para ajustar el horno que dará lugar a la temperatura de entrada:
Control adaptativo
Una CPU reajusta el PID según el punto de trabajo de la planta:
Control predictivo
Usan un modelo matemático basado en casos anteriores para predecir la evolución del proceso en el futuro. Dependen de una CPU.
Control borroso (fuzzy control)
Usa lógica difusa ”fuzzy logic” para operar. Depende de complejos cálculos de inteligencia artifical para reaccionar a variables ambiguas o poco conocidas.
Ejercicios
Dibuja el diagrama de bloques de un sistema de control en cascada en el que pretendemos regular la temperatura de una soldadura realizada por un robot móvil SCARA.
La señal a regular es la temperatura (entrada y salida del sistema.
Cuando la temperatura es óptima, el motor del SCARA se mueve a la velocidad adecuada para el cordón de soldadura.
En una pequeña embarcación tenemos una válvula controlada por PID para regular un caudal de fluido refrigerante. Pueden suceder pérdidas en el circuito de fluido. Estas se miden gracias a un sensor de peso alojado en el tanque de sentinas. Dibuja e diagrama de bloques y mejora el sistema con feedforward de la medida del líquido perdido.
Tenemos un sistema de control realimentado con PID. Las perturbaciones no son medibles. Queremos ajustar el PID por el método de Ziegler-Nichols en cadena cerrada. Ante una entrada escalón unitario con una ganancia Kp=8 el sistema comienza a oscilar conforme a la siguiente gráfica:
Ajusta el PID conforme a la tabla de Ziegler-Nichols (visible durante el examen).
Solución:
Kp = 0,6·8 = 4,8
Ti = 0,5 · 4s= 2 s
Td = 0,125 · 4s = 0,5 s
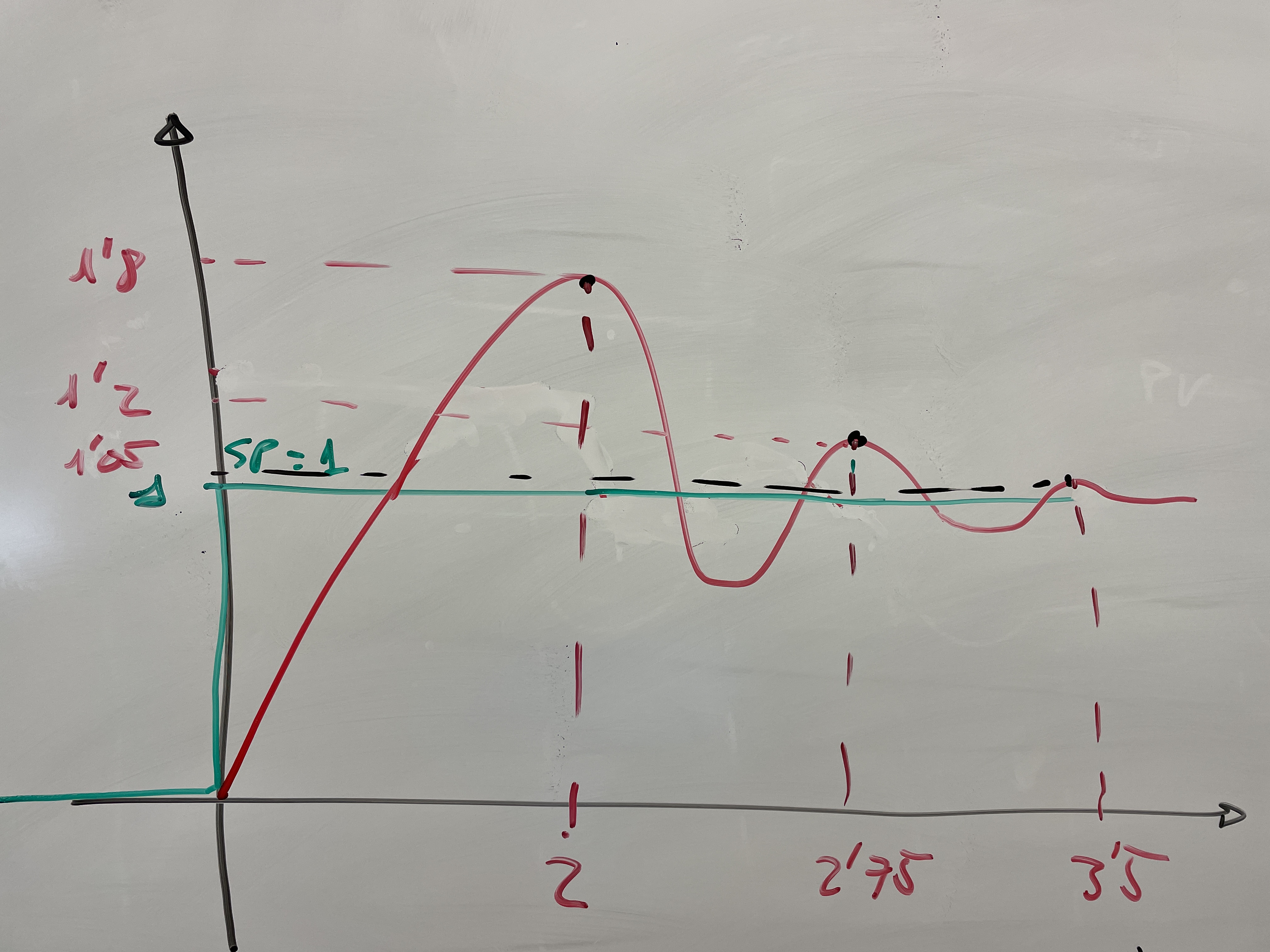
Se pretende usar el criterio de Harriot para ajustar el control de estabilidad de un coche para condiciones de mal tiempo meteorológico. Se ha ajustado el controlador para un “bandazo” brusco (SP=1) de modo que con una ganancia kp=5 (deshabilitando ki y kd) resulta una relación de 1/4 entre las dos primeras oscilaciones:
a. Calcula Ti y Td.
b. Con todo integrado (Kp, Ti, Td), el sistema se vuelve lento. ¿Qué habría que hacer?
Solución:
a. Comprobamos que entre la segunda sobreoscilación (0,2) y la primera (0,8) hay una relación de 1/4 (SÍ, la hay, por tanto está bien ajustado). Procedemos a medir el periodo de oscilación P= 0,75 s. Ten muy en cuenta que Kp=5 es provisional, y sólo sirve para hallar Ti y Td.
Calculamos Ti y Td:
Ti = 0,75s/6 = 0,125 s
Td = 2·0,75s/3 = 0,5 s
b. Fijar Ti y Td a los valores calculados en el apartado anterior y ajustar Kp hasta que volvamos a tener una gráfica con una relación de 1/4 entre las dos primeras oscilaciones.