Aclaraciones:
- Los amplificadores ponen “1/4” porque los TL084 son amplis que vienen encapsulados de cuatro en cuatro.
- Los valores de los condensadores se me antojan excesivamente altos. Es probable que donde pone “m” (mili) realmente sea “µ” (micro.
Seguiremos el tutorial “Analog Electronic PID Controllers” de la página “Control Automation”: https://control.com/textbook/closed-loop-control/analog-electronic-pid-controllers/
Siglas en inglés:
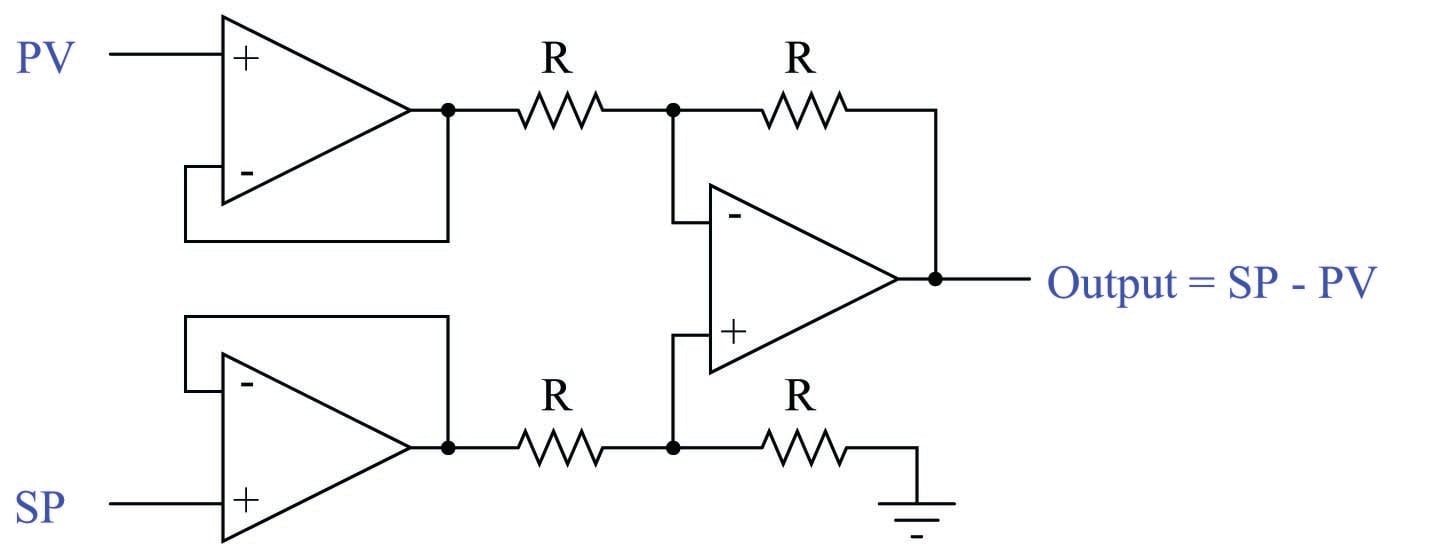
El error es la diferencia SP-PV.
Necesitarás usar este bloque en todos los ejercicios.
El amplificador de instrumentación se comporta de manera similar al restador, pero anula la ganancia en modo común.
La señal de realimentación la tendrás que simular de una forma arcaica.
Utilizaremos el bloque TRANSFER_FUNCTION_BLOCK. Configuraremos un sistema de segundo orden subamortiguado sacado del ejercicio 17b-3:
$$G(s)=\frac{4}{s^2+2.4s+4}$$

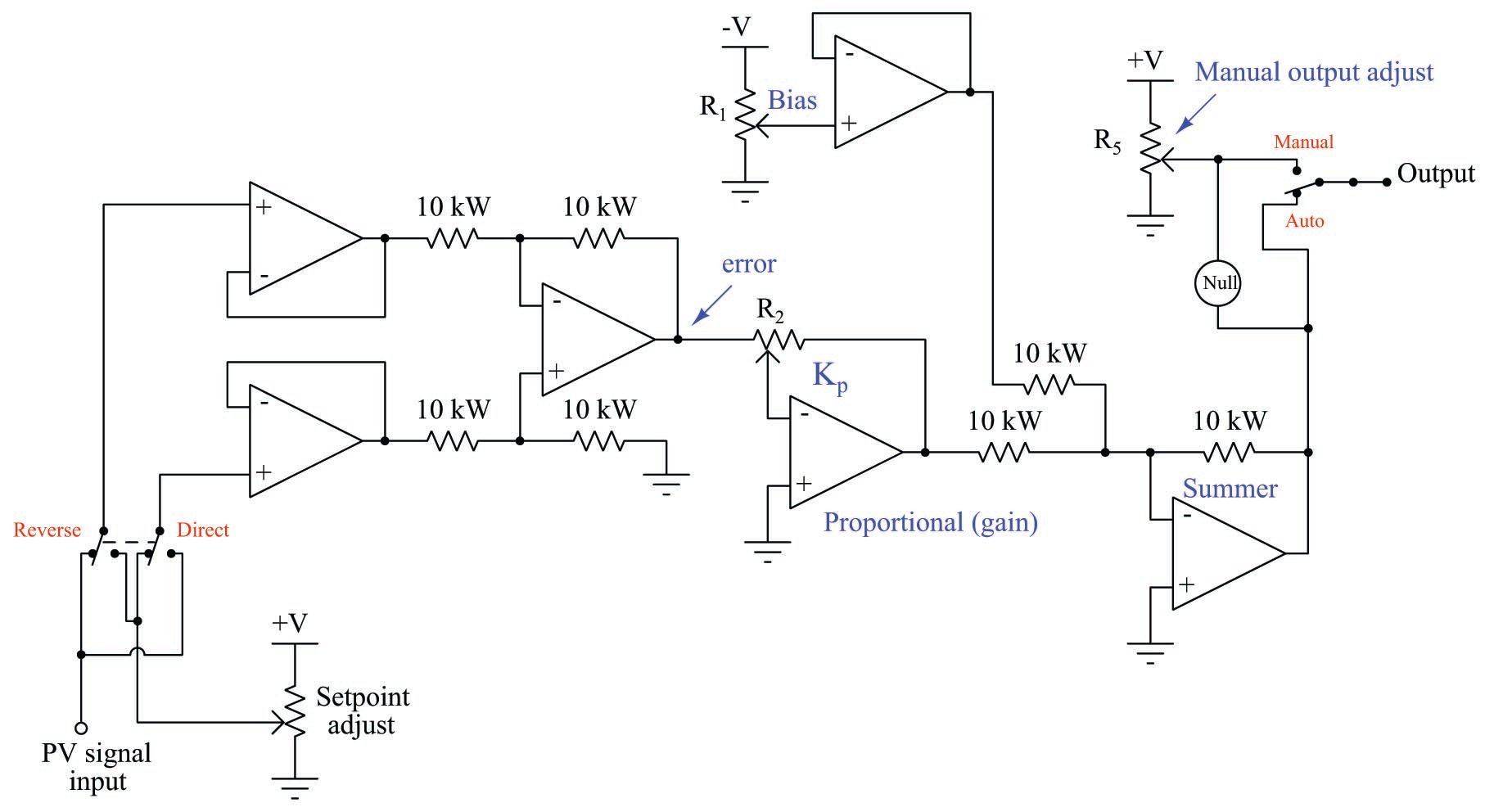
Monta y simula el siguiente controlador proporcional:
Me habéis preguntado mucho sobre interruptores y conmutadores. Los que yo uso son SPST y SPDT.
Prueba a medir la salida ante entrada escalón unitario.

Prueba a medir la salida ante entradas escalones de distintos tipos, con distintos valores. Elige un valor de sintonización estable y calcula parámetros temporales.
Las “llamadas” a la fuente de alimentación se pueden hacer con Place → connectors → on-page connector
Sugerencia de diseño:

Es un circuito complejo, pero date cuenta de que esto…

…coincide con esto:

Al tener realimentación unitaria, Y(s) coincide con H*(s)
También llama la atención la presencia del inversor de ganancia -1. Esto se debe a la fórmula:
$$c(t) =k_p·\left( e(t)+ \frac{1}{T_i} \int_0^t{e(t)}\ dt +T_d·\frac{d\ e(t)}{dt} \right)$$
En esta fórmula la constante proporcional multiplica a todo (por eso se pone antes de separar los términos). En otras versiones los verás totalmente separados (P, I, D):

