En sistema de control de la figura tenemos los siguientes bloques:
G(s): Planta física cuyo proceso deseamos controlar.
H(s): sensor de realimentación y acondicionador de señal.
R(s): regulador/controlador que actúa sobre la planta.
Vamos a analizar las posibles técnicas de regulación para R(s).
La entrada del regulador es la señal de error E(s), y la salida es la señal de control C(s).
Control proporcional
Es el regulador más sencillo. Es un simple amplificador de ganancia kp. La salida es proporcional a la entrada:
$$c(t)=e(t)·k_p$$
$$C(s)=E(s)·k_p$$
Siendo kp la constante proporcional, o ganancia proporcional del regulador. Si el error es cero, la salida es nula.
El problema del control proporcional es que sufre de error en régimen permanente.
Control proporcional e integral
La acción integral suministra una salida C(s) proporcional a la integral (la acumulación) del error de regulación E(s). El parámetro de acción integral (Ti) se expresa en segundos.
El tiempo integral consiste en el intervalo de tiempo que necesita la acción integral para suministrar una señal de control equivalente a la obtenida con la acción proporcional (una repetición) si la entrada aplicada al regulador fuese un escalón.
Un regulador PI bien ajustadopermite anular el error E(s), ya que si la salida del proceso es constante es porque su entrada igualmente lo es y para esto es necesario que el integrador no integre, lo que equivale a decir que el error de regulación es nulo.
El circuito que lo modeliza es el amplificador integrador:
Efecto en lugar de las raíces de Evans: El regulador integral introduce un polo y un cero. El polo en s=0 (es decir, polo en el origen), y el cero en $s=\frac{-k_i}{k_p}= \frac{-1}{T_i} $.
Cuanto más bajo sea el tiempo integral (más alta la frecuencia de muestreo), más separados estarán el polo y el cero, intensificando la acción integral. Por el contrario, si aumentamos el tiempo integral (reducimos frecuencia de muestreo), el polo y el cero serán prácticamente coincidentes, anulando la acción integral.
Control proporcional y derivativo
La acción derivativa suministra una acción proporcional a la derivada (la variación) del error. El parámetro de la acción derivativa (Td) se expresa en segundos.
Permite acelerar la respuesta del proceso cuando se producen cambios de la consigna y, en cambio , no actúa en régimen permanente (se anule o no el error de regulación).
El control PD aparenta ser una acción proporcional que se anticipa en el tiempo Td segundos:
El efecto anticipador del Td produce una estabilización del proceso controlado, lo cual puede compensar la inestabilización del Ti.
El circuito que lo modeliza es el amplificador derivador:
Y su función de transferencia es:
$$v_{out}(t)=-RC ·\frac{d\ v_{in}(t)}{dt} $$
Tomaremos las siguientes equivalencias:
$T_d= RC $
$k_d=T_d·k_p $
Veamos la función de transferencia del controlador PD (proporcional sumado a derivativo). Tomamos c como salida y e como entrada:
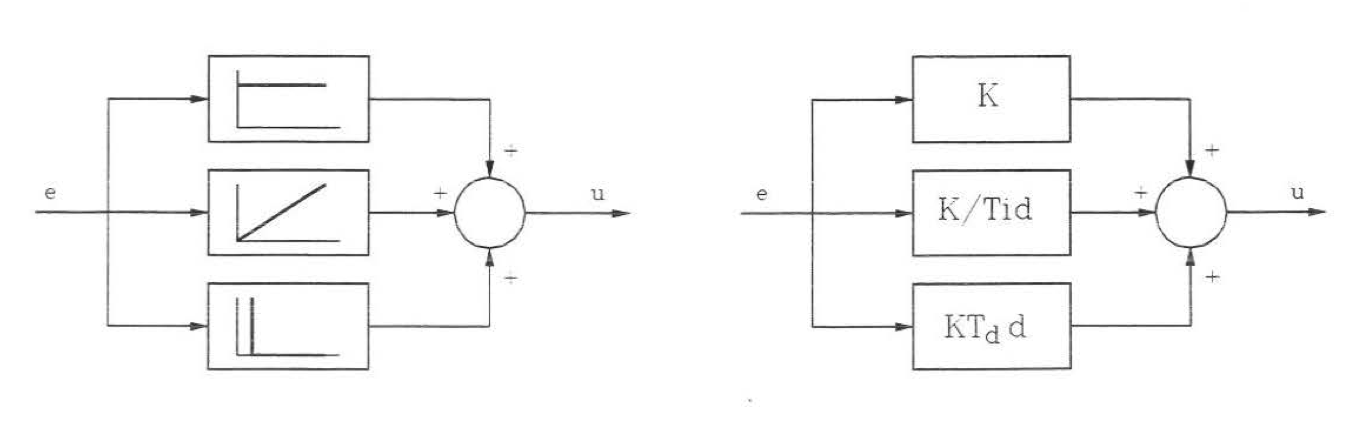
Vemos los tres términos sumados o, haciendo máximo común divisor, quedan multiplicamos y vemos claramente:
La constante proporcional kp
El polo en el origen y el cero que forman la acción integral.
El cero que forma la acción derivativa.
Vídeos ejemplos PID
Ejemplo sencillo de PID en el mundo real: selector de posición angular:
Te explico el vídeo anterior:
El interruptor cambia el signo de la consigna. Es una forma de provocar un cambio muy brusco en la consigna para ver el tiempo de respuesta y las oscilaciones que presenta.
El primer potenciómetro es la consigna.
Después viene la salida, conectada por una correa. El ángulo de la salida debe coincidir con el del potenciómetro de consigna.
A la derecha tienes los tres potenciómetros de constantes proporcional, integral y derivativa.
Este otro vídeo es un ejemplo de PID por software creado en Arduino usando un sensor láser y un servomotor:
Otro vídeo sobre PID (este no he tenido tiempo de verlo):